
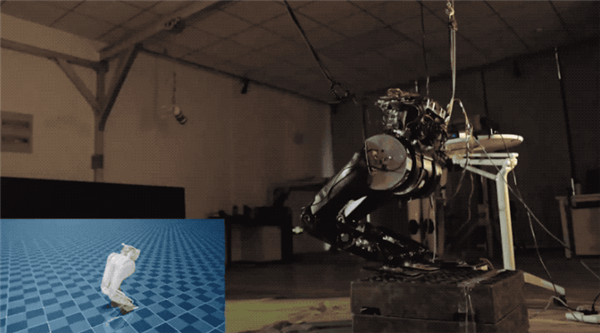
全球首次以「电驱机器人」打破波士顿动力空翻专利的机器人公司,不藏!
更多的人形机器人技能,摆在舞台前。
事实上,它也有一些精细的工作:做咖啡。

它也是世界上第一个实现自主咖啡拉花的人形机器人。
我看见他左右摇着拿着拉花杯(打奶缸)的手腕,不紧不慢:
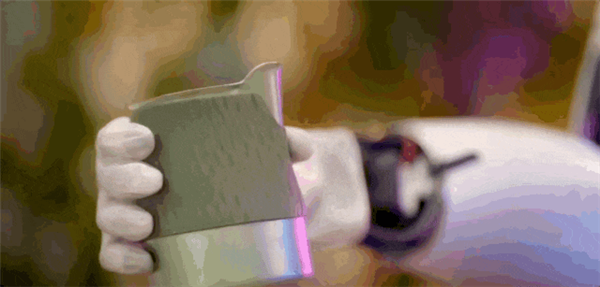
然后你会得到:
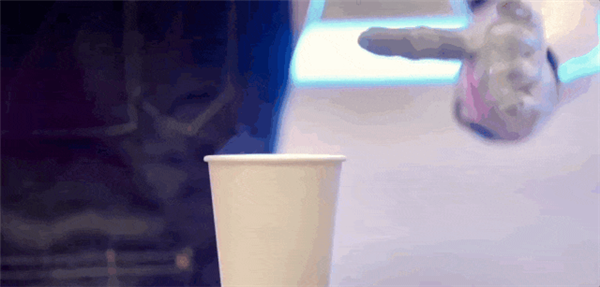
然后刷衣服,隐藏功名:

除了在咖啡馆里进行高精度的独立咖啡拉花外,还可以为工厂员工分发夜宵,并在室内外场景中担任领路员。
甚至可以帮我们遛狗。

正式介绍,公司背后的Magiclab,专注于通用机器人技术和人工智能技术,听说走的是全球化路线。
人形机器人只是他们产品线的一员,仿生四足机器人、工业四足机器人、通用人形机器人等,都是公司计划的一部分(正在推广)。
着陆场景也很广泛,涵盖家庭、工业、商业等。
据了解,3C场景的落地应用正在开发中,预计年底将在生产线进行试运行。

在生产车间进行清洁设备性能测试,效率提高了30%,同时减少了70%的人工干预需求。

自研伺服电机,大模型也用上了
MagicLab团队专注于机器人核心力矩电机关节、机械臂、足式机器人等通用机器人核心技术。
该团队认为,通用机器人的最终形式必须是人形机器人。
从技术上讲,团队主要专注于解决硬件和算法问题。
在硬件方面,团队选择自主研发伺服电机和核心部件,以扩展能力。
扭矩电机关节模块的设计导致提升电机的功率密度和扭矩密度,包括谐波模块关节、直线模块关节、类型和微伺服单元。
?前团队拥有的电机系列涵盖了从10N开始的电机系列.m到500N.m的扭矩范围。
")
")
")
还没有评论,来说两句吧...